
Team Cohort to Develop Multi-Domain, Multi-Autonomous Vehicle Control System for Canadian Warships
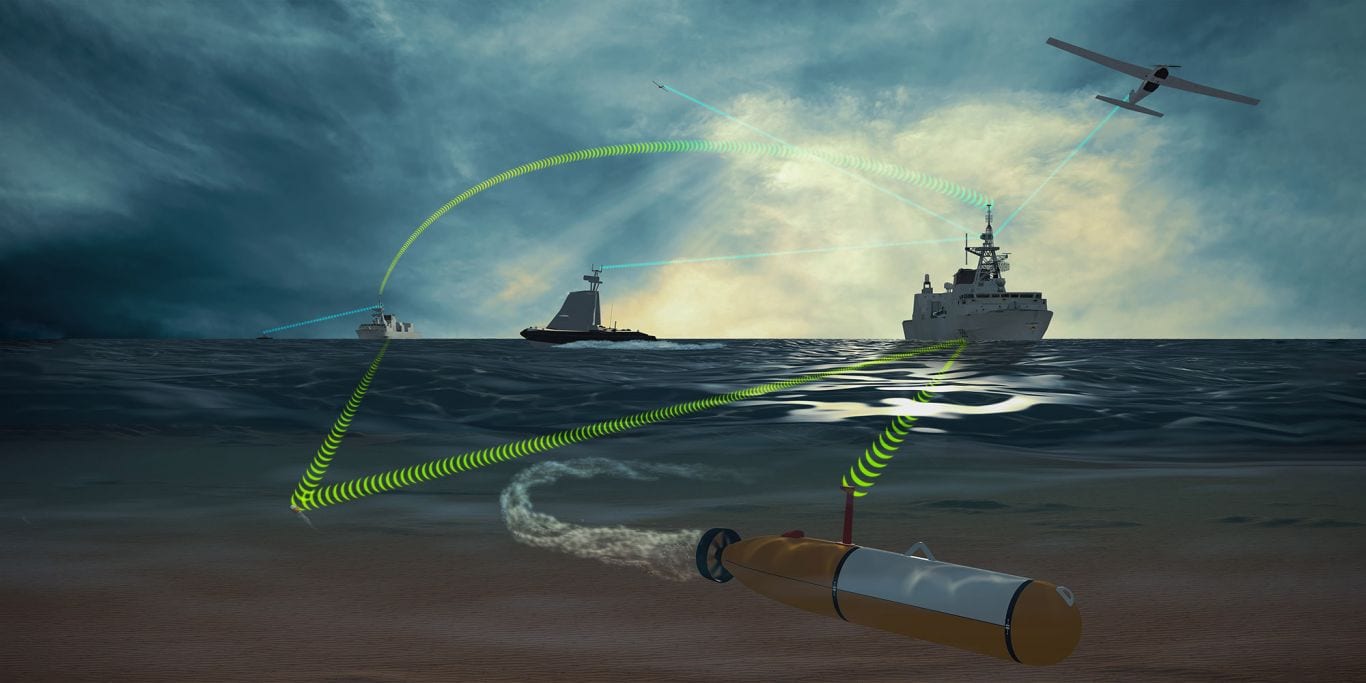


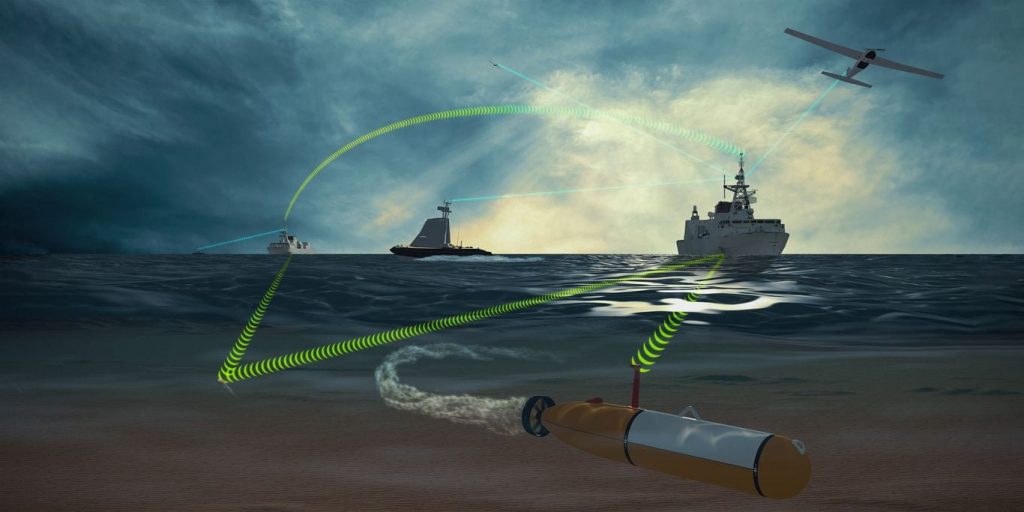
OTTAWA, Ontario — Team Cohort, a team of autonomous industry experts comprising Kongsberg Geospatial, Four DRobotics Corp and SeeByte, has been awarded a contract from Weir Marine Engineering to develop and test a Maritime Multi-Domain Control System (MMDCS), Kongsberg Geospatial said in a March 18 release. The system will allow operators to simultaneously operate multiple autonomous vehicles in the air, on the water, and underwater — all from a single shipboard control station.
The system could allow Royal Canadian Navy (RCN) warships to effectively extend their sensor range using autonomous vehicles, while providing protection from seaborne threats such as mines or hostile unmanned craft.
The MMDCS is a challenging project that requires experience with the deployment of autonomous unmanned vehicles, and operations of maritime control stations, as well as existing and emerging NATO standards including Stanag 4586 and 4817. This specialized knowledge and expertise is provided by the team of Kongsberg Geospatial and Four DRobotics Corp of Ottawa, Canada, and SeeByte of Edinburgh, Scotland.
For this project, Kongsberg Geospatial will provide operator control stations based on its IRIS UxS vehicle command and control software product, which provides an overall real-time picture of the terrain, airspace, and underwater environment where the ships and their supporting UxV (Unmanned [X] Vehicle) teams are operating.
Four DRobotics Corp and SeeByte will provide goal-based mission planning and reasoning (AI-supported) software systems to support autonomous mission development and execution for a UxV team consisting of an unmanned aerial vehicle, an unmanned surface vehicle, and an unmanned underwater vehicle.
The MMDCS will provide a tactical capability for the command and control and information management required to simultaneously support unmanned vehicles in all three naval operations domains, including air, surface, and subsurface.
The final objective of the project is to provide real-time or near-real-time situational awareness for warships in all three domains: underwater, on the water, and in the air, allowing improved threat assessment and target engagement.
The development and testing of the prototype MMDCS is expected to be completed by mid-2021.